Robot à Chenilles pour BananaPI ou Arduino
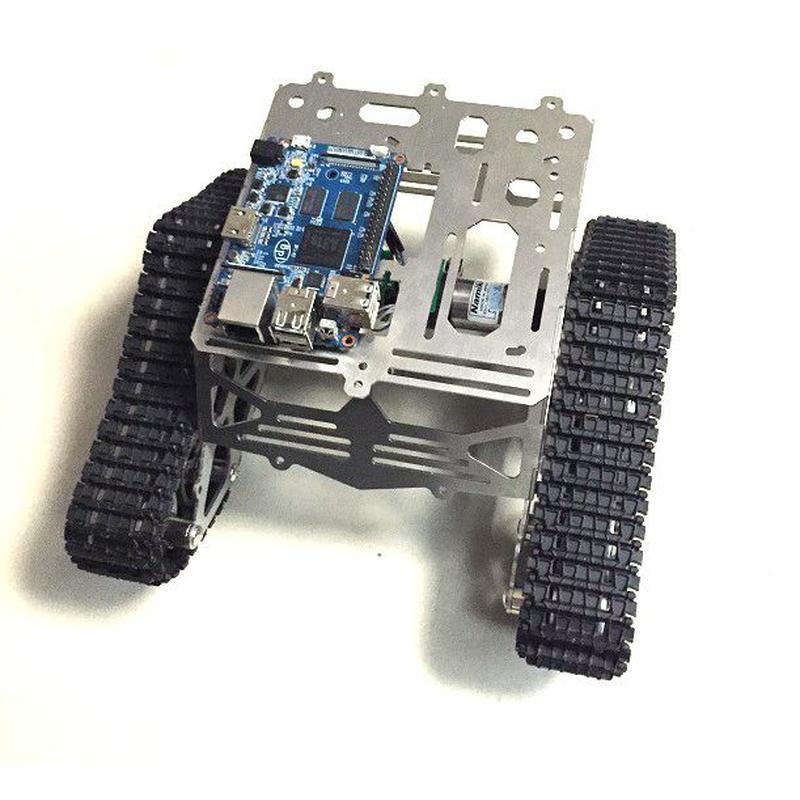
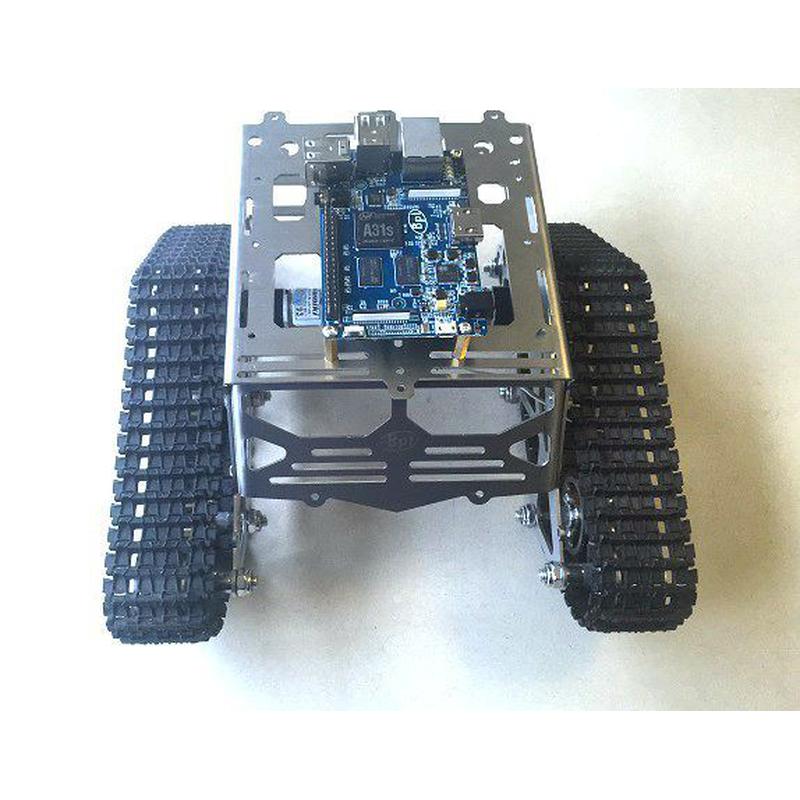
Sinovoip propose un chassis métallique de robot à chenille, le “BPI-car”.
109,00€ TTC - 90,83€ HT
Les clients ayant consulté cet article ont également regardé
Produits similaires
 22,50€ TTC - 18,75€ HTEn stock9 left in stock
22,50€ TTC - 18,75€ HTEn stock9 left in stock 29,90€ TTC - 24,92€ HTEn stockOnly 1 left in stock!
29,90€ TTC - 24,92€ HTEn stockOnly 1 left in stock!
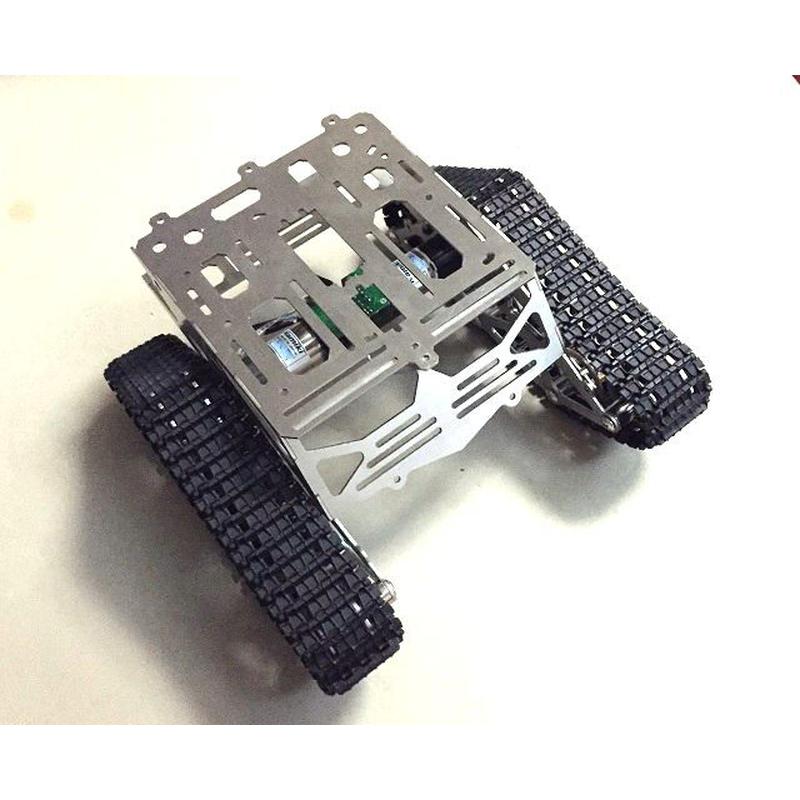
Ce kit de Robot à chenille inclut un chassis métallique avec ses chenilles et 2 moteurs. Aucune carte électronique n’est fournie avec ce KIT.
Vous pouvez trouver sur youtube des vidéos de présentation du chassis.
https://www.youtube.com/watch?v=PQv9eC-a_LM
https://www.youtube.com/watch?v=cgSt-dgGcsM
https://www.youtube.com/watch?v=t7tAY_jhxkg&feature=youtu.be
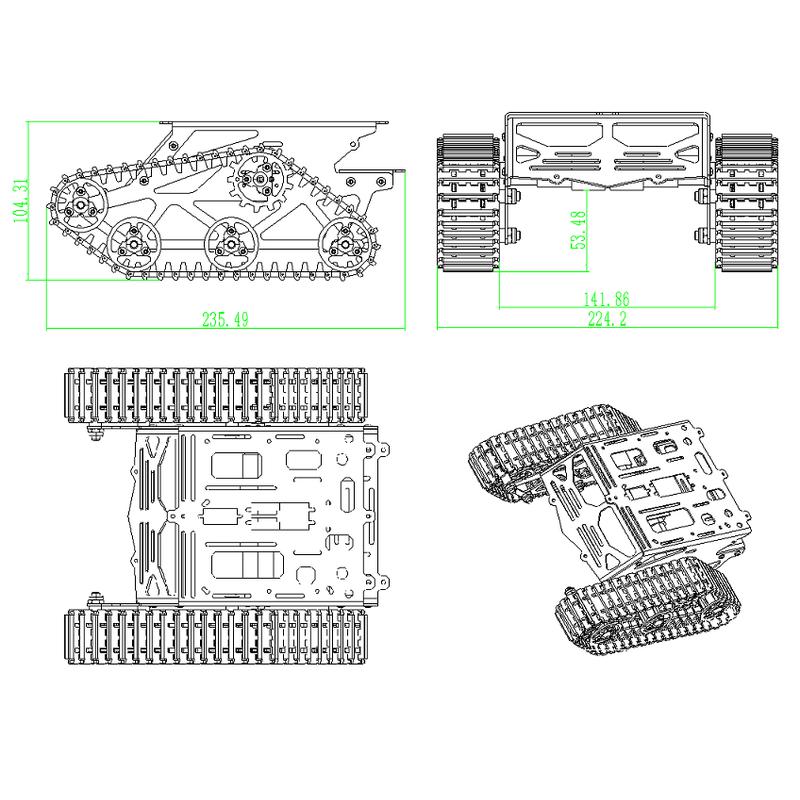
Dimensions : 235mm x 224mm 104mm . L x l x H
Poids : 1.3kg
Caractéristiques des moteurs :
- Type: 22CL-3501PG
- Couple de blocage: 1.6nm (16 kg cm)
- Couple continu: nm (5 kg cm)
- Tension: 12VDC
- Diamètre: 22mm
- Longueur de l’arbre: 19mm (avec un degrés en métal double incision)
- Diamètre de l’arbre: 4mm
- Longueur: 67mm (pas y compris encodeurs, boîte de vitesses de l’arbre de sortie)
- Décrochage courant: 1.8A
- Rapport de réduction: 80: 1 (métal planétaire réducteur)
- Vitesse de sortie: 120 r/min (tension d’entrée DC 12 v)
- Codeur: 2 impulsions par tour
Câblage du moteur

Schéma de l’encodeur
.jpg)

Sorites de l’encodeur Moteur Namaki
Tuto qui explique l’asservissement d’un moteur à l’aide d’un régulateur PID, vous trouverez ici un code pour l’Arduino qui devrait fonctionner aussi pour le moteur Namaki.