GY-86 10 DOF
25,41€ TTC - 21,18€ HT
Les clients ayant consulté cet article ont également regardé
Related products
 8,50€ TTC - 7,08€ HTEn stockOnly 1 left in stock!
8,50€ TTC - 7,08€ HTEn stockOnly 1 left in stock! 19,90€ TTC - 16,58€ HTEn stock14 left in stock
19,90€ TTC - 16,58€ HTEn stock14 left in stock

La carte peut être alimentés en 3.3V ou 5V (2 broches d’alimentations).La carte possède un régulateur 3V3 ainsi que des adaptateurs de niveau 5/3.3V pour les broches SDA et SCL et donc le GY-86 est entièrement compatible avec des m
icrocontrôleurs alimentés en 3V3 ou 5 V (arduino, mbed,…).
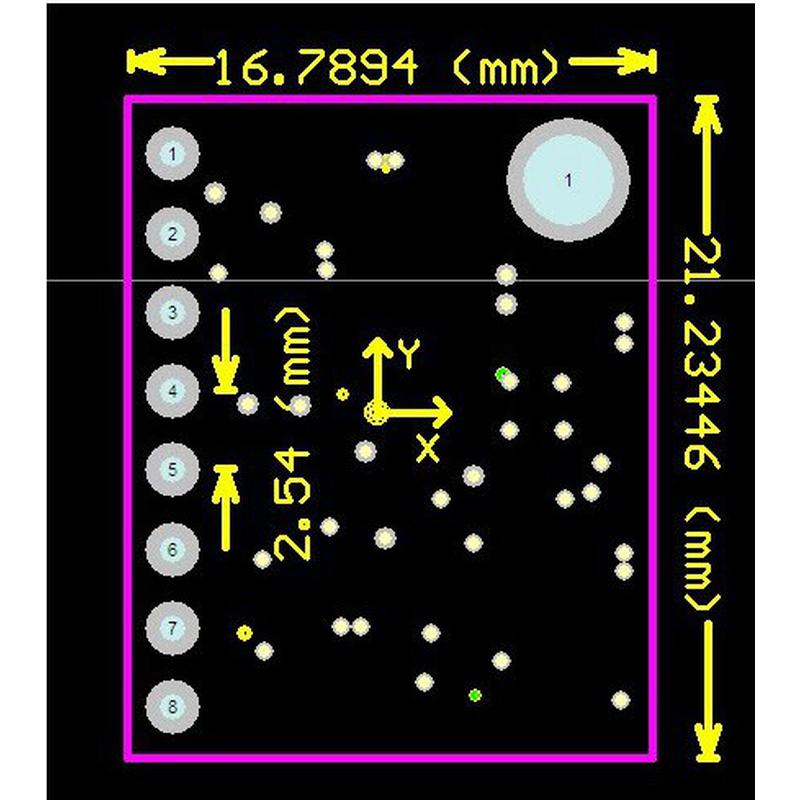
Communication I2C pour les 3 circuits (2 résistances de pull-up sont placées sur la carte). Seuls les circuits MPU650 et MS5611 sont directement reliés aux broches I2C (SCL et SDA) disponibles sur les 8 broches du bornier de connexion.

librairie arduino MPU-6050 : gyroscope et accéléromètre 3 axes https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050
librairie arduino MHC5883L : ce circuit est relié au MPU-6050 qui est maitre I2C.
https://github.com/jarzebski/Arduino-HMC5883L
librairie arduino MS5611 : capteur i2C de température et de pression ( et donc altitude)
https://github.com/jarzebski/Arduino-MS5611
Remarques : Le capteur magnétique HMC5883Lest quant à lui relié aux broches XSDA et XSCL du circuit MPU6050 qui doit donc être configuré en mode bypass.
mpu.setI2CMasterModeEnabled(false);
mpu.setI2CBypassEnabled(true);
mpu.setSleepEnabled(false);
Un très bon exemple de test est donné sur le github de Jarzerski.